2014-10-19
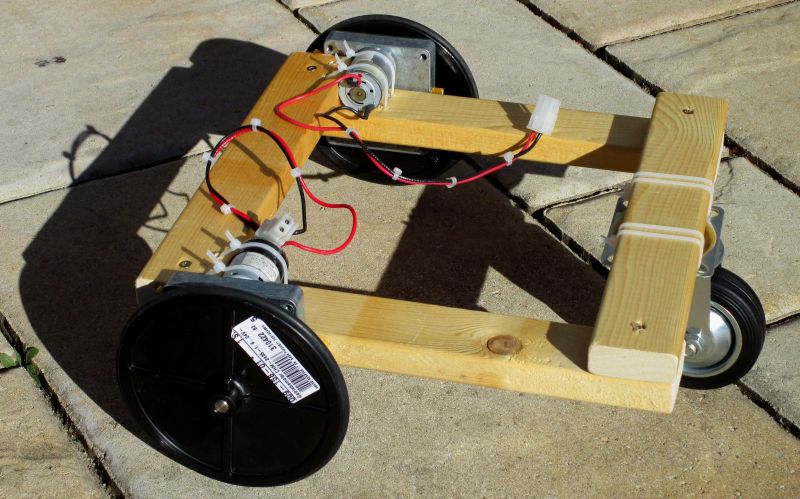
Das Chassis des Prototypen ist vorbereitet: Einfacher Holzrahmen, zwei angetriebene Räder und ein Stützrad.
2014-10-25
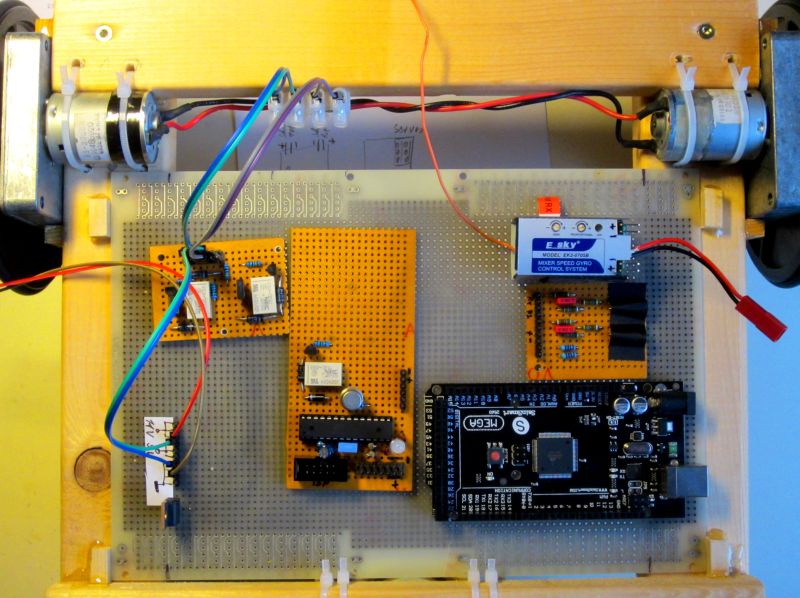
Eine frühe Phase des Prototypen: mehrere Bausteine sind angefertigt, die Antriebsräder und die Trägerplatine für die Elektronik sind montiert.
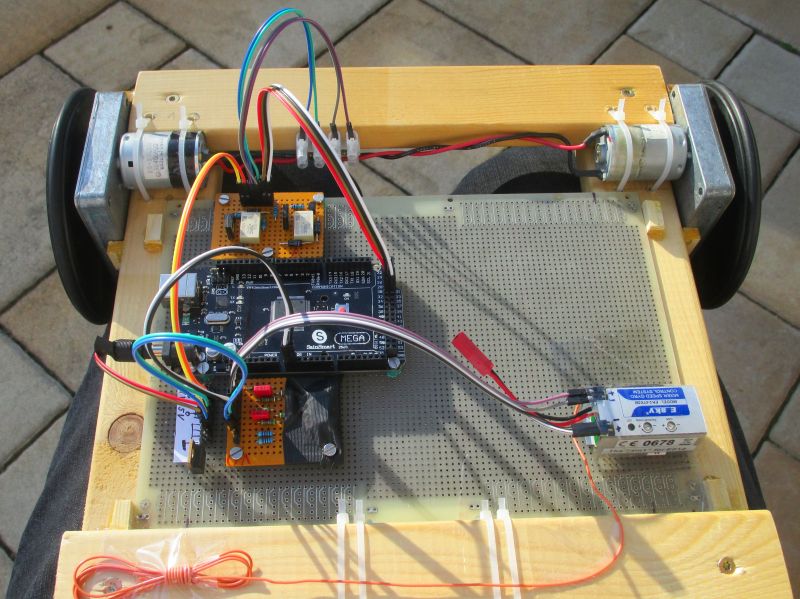
2014-10-26
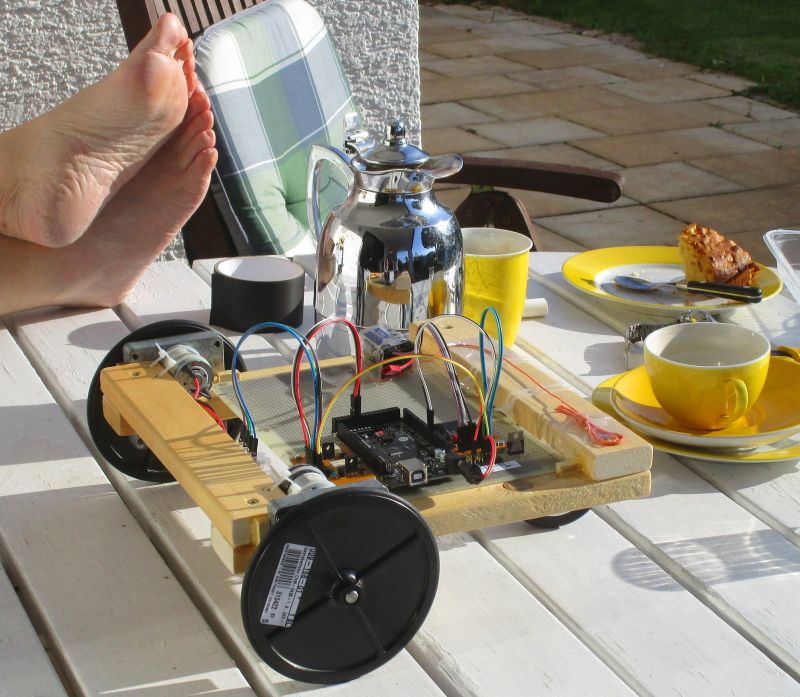
Bei bestem Herbstwetter machen die Verdrahtungsarbeiten auch auf der Terrasse Fortschritte.
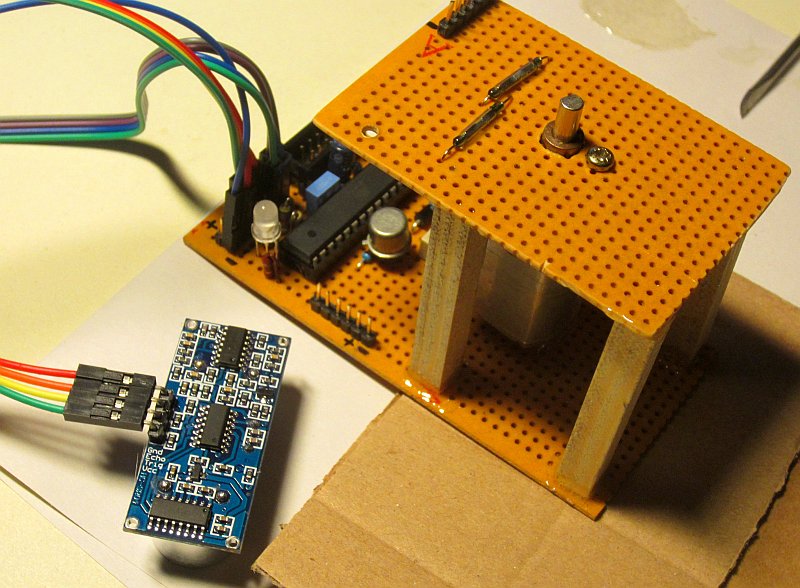
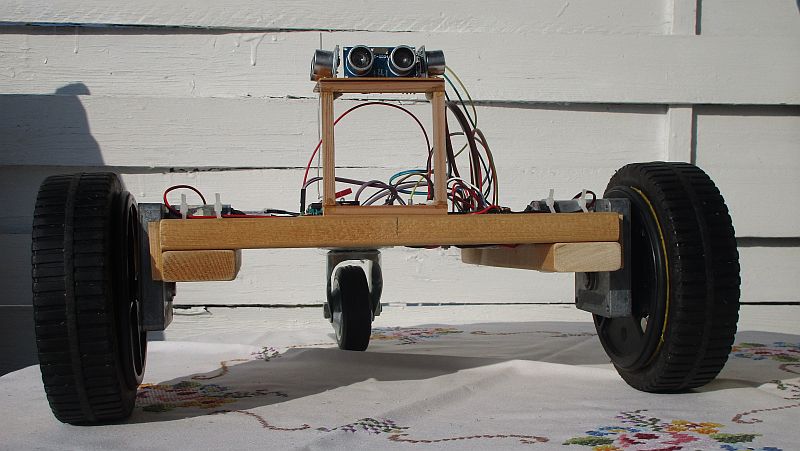
2014-11-06
Die erste Version des Ultraschall-Radars nimmt Gestalt an.
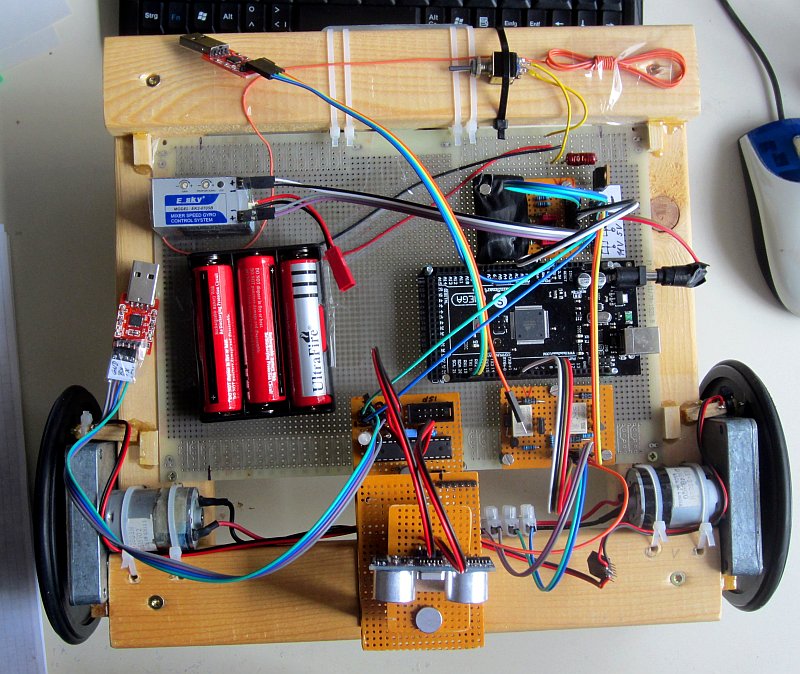
2014-11-08
In diesem Zustand sind schon erste Testfahrten in der Wohnung möglich, allerdings ist die Firmware des Zentralcontrollers noch in einem sehr bruchstückhaften Zustand.
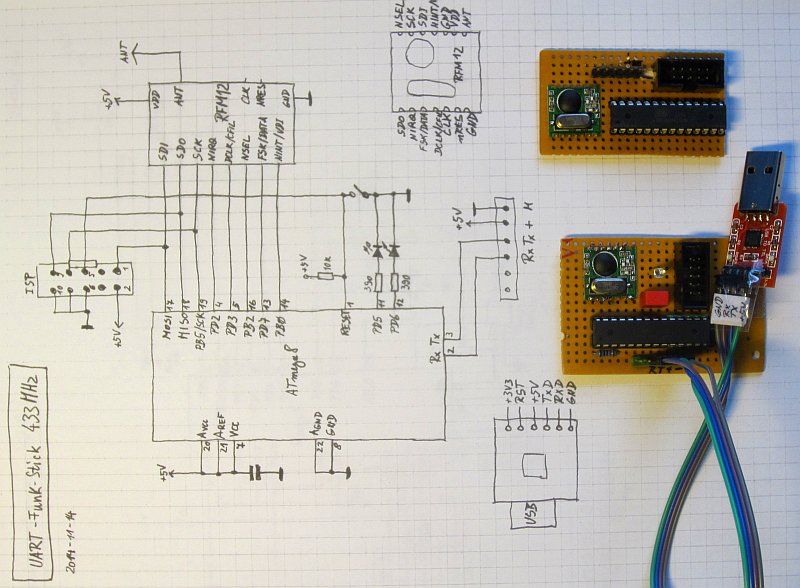
2014-11-14
Um drahtlosen Kontakt zum Gefährt herzustellen brauche ich zwei Sende-/Empfangseinheiten. Das ist fast eine leichte Übung, weil diese Technik schon in meiner Selbstbau-Heizungssteuerung mit Erfolg arbeitet.
2015-01-21
Nach einigen Fehlversuchen tatsächlich geschafft: Inbetriebnahme eines LCD-Displays, 4 x 20 Zeichen, mit I2C-Anschluss an einem Arduino Micro.
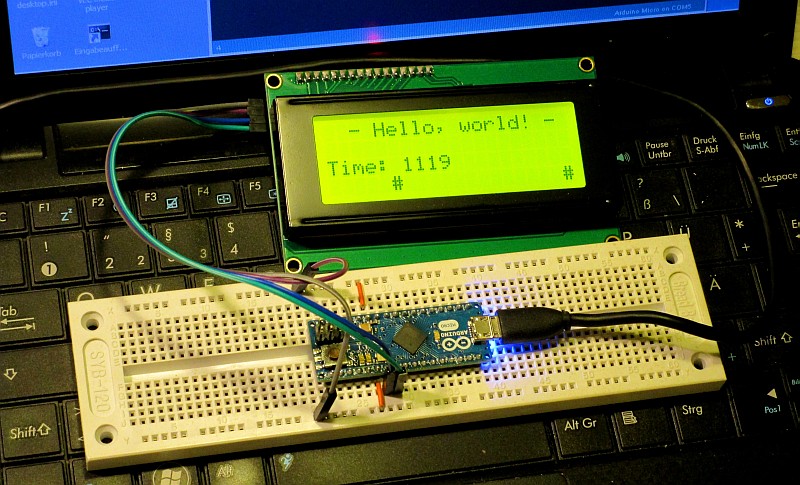
Warum habe ich nicht schon früher mit dem Breadboard gearbeitet?
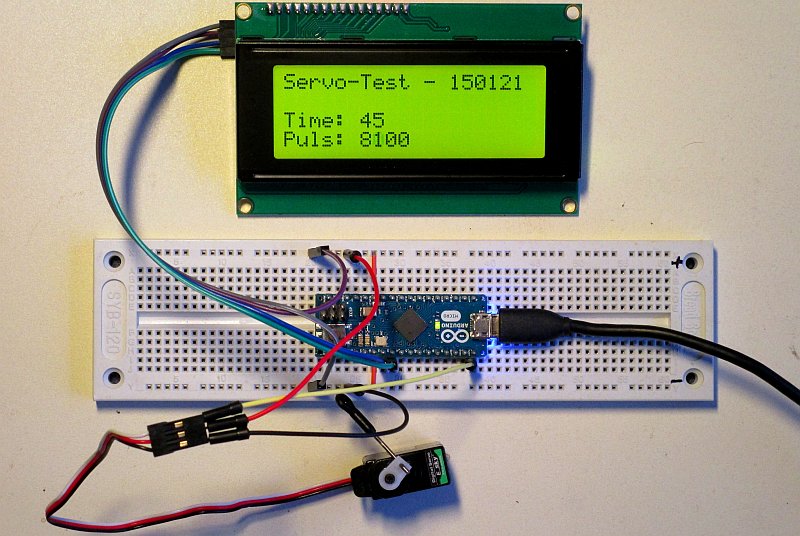
In kurzer Zeit ist ein Versuchsaufbau zusammengesteckt, ein Arduino-Sketch geschrieben, um eines der Servos aus dem zerlegten RC-Heli zu testen. Das LCD-Display erweist sich als leicht zu programmierendes Anzeigegerät für schnelle Tests. Das Servo allerdings ist weniger für den geplanten Einsatz als Ultraschallsensor-Antrieb geeignet, weil der Drehwinkel nur ca. 120 Grad umfasst (ich bräuchte 180 Grad).
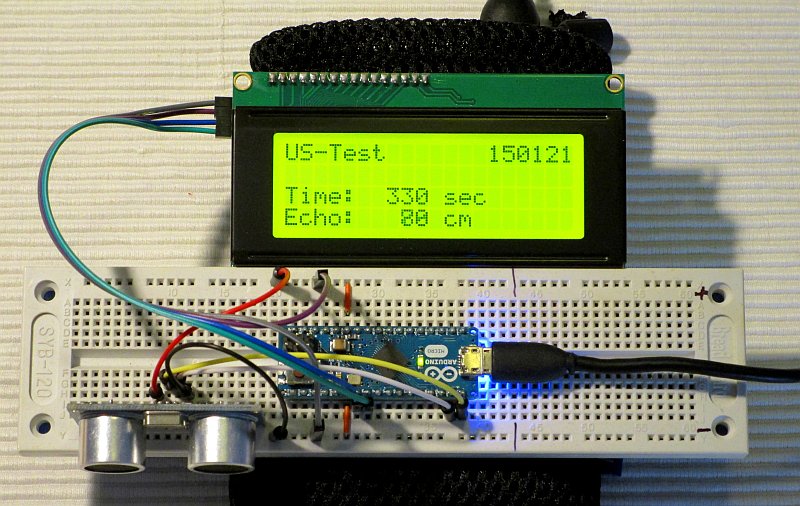
An demselben Abend ein weiterer Versuchsaufbau mit einem Ultraschall-Modul.
Wie praktisch: Da der Arduino-Controller direkt über USB programmiert und mit Spannung versorgt wird, kann man ein normales Akkupack zum Nachladen von Handys verwenden und mit dem Versuchsaufbau frei herumlaufen. Das mache ich dann in der Wohnung und im Garten, um ein Gefühl für die Qualität des Echosignals zu bekommen:
Hmm, entweder das US-Modul höher setzen (dann kommt das Gefährt nicht mehr unter die Gartenschaukel), oder mit einer unten liegenden abschirmenden Fläche experimentieren...
2015-01-22
Das nächste Experiment: Drei Ultraschall-Sensoren verdrahtet, die Echo-Signalleitungen über Dioden als Wired-OR-Summensignal verschaltet, die drei Trigger-Leitungen auf getrennte Ausgangspins gelegt, einen weiteren Arduino-Sketch geschrieben - und es funktioniert irgendwie nicht.
Also das kürzlich für rund 10,- von SainSmart erworbene Hilfsmittel hervorgekramt - ein 8-Bit-Logic-Analyzer - und nachgemessen. Die Wired-OR-Verschaltung hätte ich vorher testen sollen: Laut Wikipedia ist das, was ich gebaut habe, eher ein Wired-AND ...
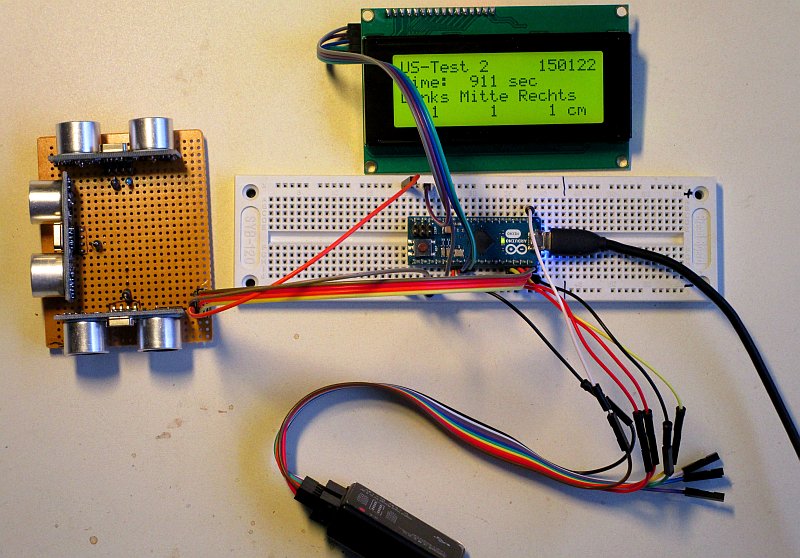
Nachdem die Dioden wieder ausgebaut, die Echo-Signalleitungen einzeln auf Eingabe-Pins gelegt und das Programm umgebaut ist, funktioniert die Sache auf Anhieb. Um mit dem Gebilde frei umherlaufen zu können, baue ich aus Pappe eine Halterung mit Führungsschienen.
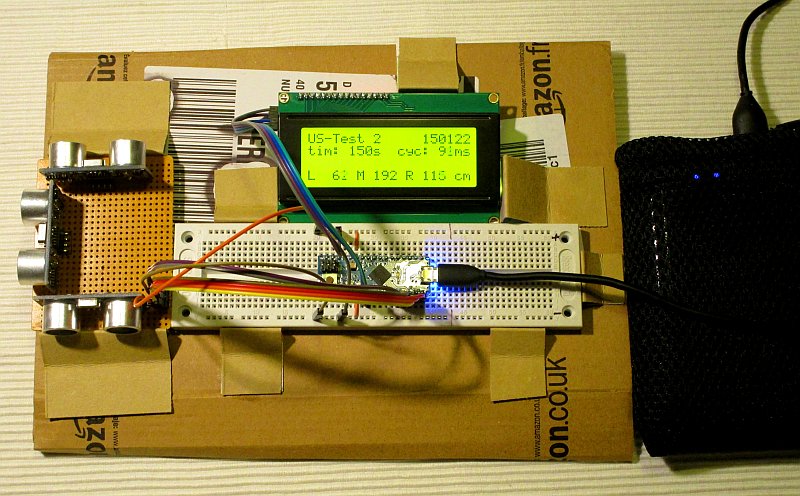
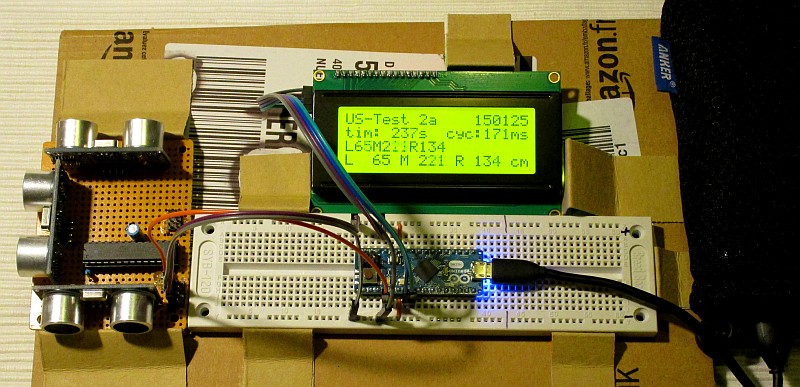
2015-01-25
Auf der Platine mit den drei Ultraschall-Sensoren gibt es jetzt einen eigenen Controller, der die Messungen durchführt und das Ergebnis an der seriellen Schnittstelle ausgibt. Mit entsprechend modifiziertem Arduino-Sketch kann ich das Gebilde wieder mobil testen.
2017-04-07
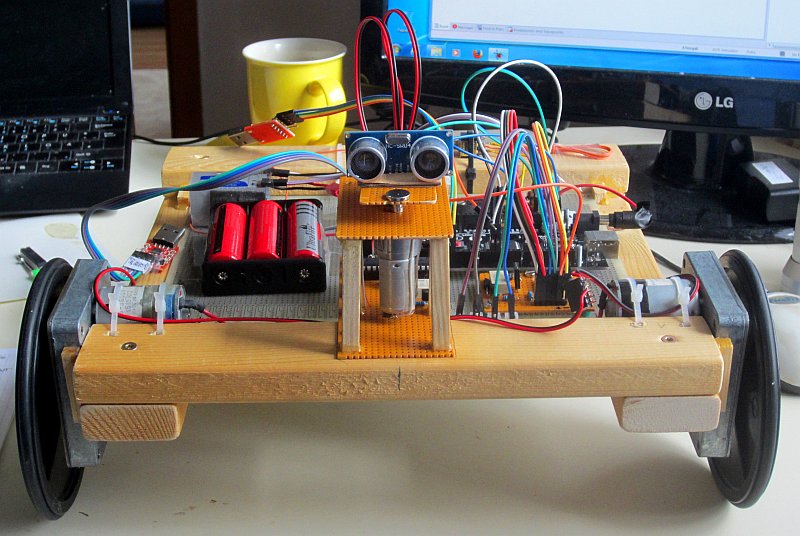
Nach langer Zeit geht der Bau weiter. Vom verschrotteten Rasenmäher konnte ich die beiden Vorderräder retten, und mit denen habe ich dem Gefährt breite, geländegängige Schlappen verpasst.
Und eine erste Probefahrt auf dem Rasen gibt es auch schon. Macht einen etwas müden Eindruck, aber ich habe eh vor, statt drei jetzt vier Zellen in Reihe zu schalten: Mit 14.4V wird es etwas fixer gehen als mit 11.8V.
